Безпилотна релсова транспортна система за подземни мини

Системни функции
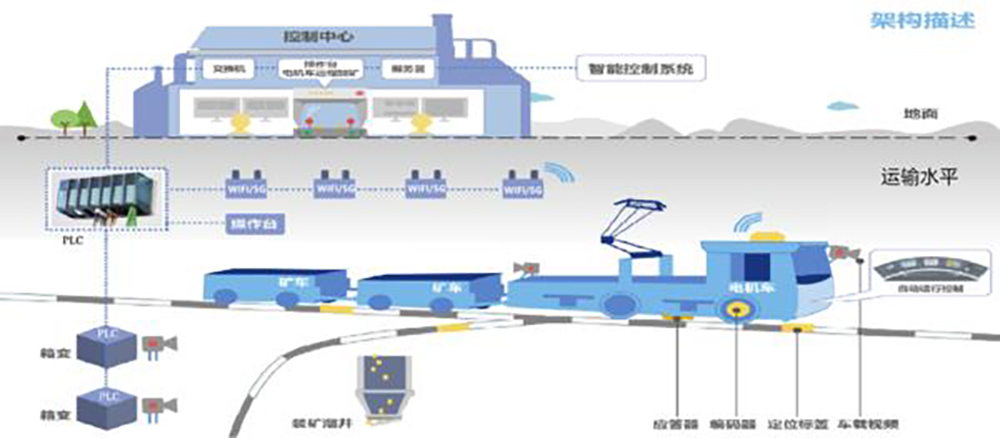
Електрическата локомотивна система без водач се състои от система за управление на автоматична работа (ATO), блок за управление на PLC, блок за прецизно позициониране, интелигентен блок за дозиране, блок за безжична комуникационна мрежа, контролен блок за централизирано затваряне на превключващ сигнал, видеонаблюдение и видео AI система и контролен център.
Кратко описание на функцията
Напълно автоматичен крейсерски режим:според теорията за круиз с фиксирана скорост, в съответствие с действителната ситуация и изисквания във всяка точка от нивото на транспортиране, крейсерският модел на превозното средство е конструиран така, че да реализира автономното регулиране на скоростта на движение на локомотива.
Система за прецизно позициониране:прецизното позициониране на локомотива се постига с помощта на комуникационна технология и технология за разпознаване на маяци и др., с автоматично повдигане на носа и автономно регулиране на скоростта.
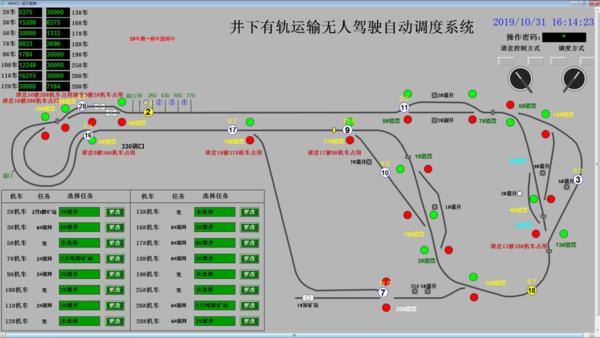
Интелигентно изпращане:Чрез събирането на данни, като ниво на материала и степен на всеки улей, и след това според позицията в реално време и работния статус на всеки локомотив, локомотивът автоматично се задава за работа.
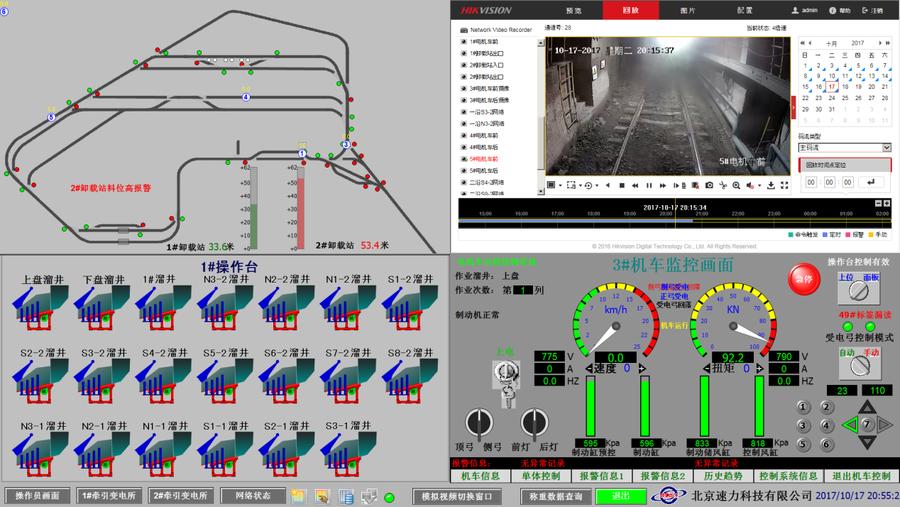
Дистанционно ръчно зареждане:Дистанционно ръчно зареждане може да се постигне на повърхността чрез контролиране на оборудването за зареждане.(Допълнителна напълно автоматична система за зареждане)
Откриване на препятствия и защита на безопасността:Чрез добавяне на високо прецизно радарно устройство пред превозното средство за постигане на откриване на хора, превозни средства и падащи камъни пред превозното средство, за да се осигури безопасното разстояние на превозното средство, превозното средство извършва автономно редица операции, като озвучаване клаксон и спирачка.
Функция за статистика на производството:Системата автоматично извършва статистически анализ на работните параметри на локомотива, траекториите на движение, дневниците на командите и завършването на производството, за да формира отчети за движение на производството.
Системни акценти.
Автоматична работа на подземни железопътни транспортни системи.
Пионерство в нов режим на работа за подземен локомотив без шофьор.
Реализация на мрежово, дигитално и визуално управление на подземни железопътни транспортни системи.

Анализ на ефективността на системата
Необслужван под земята, оптимизиране на производствените модели.
Рационализиране на броя на работещите и намаляване на разходите за труд.
Подобряване на работната среда и повишаване на вътрешната безопасност.
Интелигентни операционни механизми за управление на промяната.
Икономически ползи.
-Ефективност:повишена производителност с един локомотив.
Стабилно производство чрез интелигентно разпределение на руда.
-Персонал:локомотивен машинист и оператор по освобождаване на мина в едно.
Един работник може да управлява няколко локомотива.
Намаляване на числеността на персонала на позиции в точката на разтоварване на мината.
-Оборудване:намаляване на разходите за човешка намеса върху оборудването.
Ползи от управлението.
Анализ на данните за оборудването, за да се даде възможност за предварителна поддръжка на оборудването и намаляване на разходите за управление на оборудването.
Подобрете производствените модели, оптимизирайте персонала и намалете разходите за управление на персонала.





